


'직립보행로봇'이란 말도 정확하진 않지만, '걷는 로봇'이라는 말도 적절하진 않습니다. 걷는 로봇은 다리의 유무에 중점을 두는 것이고, 이는 2개, 4개, 6개등의 다리를 포함합니다. 하지만 이 페이지에서 중점을 두고 있는 것은 2족보행 로봇, 다시말해 인간형 보행을 하는 로봇을 지칭합니다. 그러므로 기왕 바꾼다면 이족보행로봇정도로 하는게 좋겟군요 -- 류기정
두발로 걷는 인간형 로봇.다리에 전달되는 무게문제때문에 발전의 속도가 더뎠으나 최근 혼다사의 아시모와 경쟁업체들의 다른 직립보행 로봇의 잇단 발표로 다시 관심이 집중되고 있다.
중국도 최근 선행자라는 인간형 로봇을 선보였으나, 선전에 비해 별로 대단해보이지 않아 많은 이들의 이야기거리가 되기도 했다.
일본에서도 보통 난리가 아니었던 모양입니다.
일본에서도 보통 난리가 아니었던 모양입니다.

.png "B)")

 GoogleDotCom "先行者" 일본어 문서 검색 결과
GoogleDotCom "先行者" 일본어 문서 검색 결과
![[http]](/ns/imgs/http.png) http://www.hinden5.com/senkousha/ - 일제 "선행자" 개발 프로젝트
http://www.hinden5.com/senkousha/ - 일제 "선행자" 개발 프로젝트
- http://www.hinden5.com/senkousha/wide2.html - 데모 사이트
게임은 꽤 잘 만들었습니다. 재미있으니 한 번 해보세요..png ";)")
pok는 로봇에 다리가 필요한지 궁금합니다. 건담같은 우주공간이라면 'AMBAC'같은 그럴싸한 이야기거리라도 있겠지만, 지구에서라면 쓸대없는 디자인이라고 생각합니다.
2족보행이란 것은 매우 중요한 사안입니다. 첫째, 로봇과 인간의 인터페이스에 있어서 <인간과 비슷한 외형>이란 것은 사회적 상호작용에 있어서 많은 영향을 미치기 때문이지요.그리고 이미 인간을 위해 디자인된 많은 환경에서 쉽게 인간과 치환 가능하다는 점에서, 또 다리가 결국은 바퀴보다 융통성 있다는 면에서 그렇습니다. --류기정
pok님이 말한 다리는 인간형 이족보행로봇의 경우를 말하신듯한데, 인간에게 있어서 다리의 기능을 생각해보셔요. 계단을 오를수 있지요, 사다리를 탈수 있지요, 나무를 오를수 있지요, 점프를 할수 있지요, 날라까기-_-를 할수 있지요, 탭댄스를 출 수 있지요, 예가 많네요. 다른 대용제가 없냐고 반문하신다해도 이런 기능들을 복합적으로 수행할수 있는 인터페이스로 인간다리의 표본은 쓸만하지 않을까요. --rururara표본으로는 꽤 좋은 편이지만 인간의 다리와 같은 힘을 내려면 무게가 훨씬 많이 필요하기 때문에 단지 <인간과 닮았다> 내지는 <인간처럼 움직인다>의 관점에서 접근해야 할 것 같습니다 --Gravi
재활의학적인 측면에서는 2족 보행은 중요한 과제라고 생각합니다. 아직까지는 많은 연구가 필요하겠지만, 인간을 만족할 만한 수준으로 흉내낼수 잇는 2족 보행이 가능한 시스템은 많은 환자에게 희망이 될거라고 생각합니다. -ㅎnㅂrㄹrㄱi일본의 연구에 따르면 직립보행로봇은 걸으면서 균형을 잡는 것보다는 "앞으로 넘어지면서 반대쪽 발을 디디며" 걷는 것이 더 효율적입니다. 그렇게 하면 장애물에 걸려 넘어질 때에도 애써 균형을 맞추는 것보다는 보통 걷는 것처럼 앞으로 넘어지면서 반대쪽 발을 디디면 된다는 것입니다. -- 카더라통신
이 바닥이랑 조금은 관련있는 Gravi가 아는 바에 따르면 이족보행로봇은 "일본"에서 주도적으로 밀고 있다. 대세의 방향이 중요하겠으나, 지금의 2족로봇은 사실 바퀴가 6개 있는 자동차정도로 생각하면된다.(쓸데없다는이야기다-_-). 그리고 공학적인 관점에서 기본적으로 unstable한 시스템은 같은 기능을 하는 stable한 시스템보다 어마어마한 잇점이 있지 않는 한 바보짓이다-_-;
미래에 하반신이 절단되거나 없는 사람이 이족 보행 하게 된다면 ? 그에게는 바퀴달린 전 자동식 휠체어보다는 사람과 거닐면서 필요한 이족 보행용 로봇 몸체(이걸 머라고 해야하나...)가 아닐까 ? --아무개
세계의 2족보행로봇 ¶
세계에서 인간크기의 2족보행로봇 기술을 가진 나라는 이제 무지하게 많다. 이는 마치 '100번째 원숭이'효과를 보여주고 있는 듯 한데, 불과 몇년전, 혼다에서 세계 최초의 직립보행로봇인 P2를 공개하기 전까지만 해도, 전 세계적으로 직립보행로봇을 불가능하다고 여겨지고 있었다. 그러나 그 이후로는 너무나도 당연하다는 듯이, 세계 각지의 연구소에서 수도 없이 이족 직립보행 로봇을 쏟아내고 있다. 세계적으로 수백개의 연구소에서 로봇이 만들어지며, 반 수 이상이 일본에 있다. 이제 이족 직립보행은 극히 당연한 기능이다.
혼다의 아시모:세계최고의 2족보행로봇MIT의 다리연구소의 hop & 덤블링로봇- 마크레이버트MIT의 다리연구소의 플라맹고인공근육을 이용한 다리 연구혼다의 P3 : 아시모의 전신소니의 SDR(Sony Dream Robot)키는 좀 작은편와세다 대학의 와비안 : 최초의 보행연구 로봇, 와봇의 후예?KIST의 우울한 4족보행로봇, 센토 러시아 쌩페테스부르그 대학의 로봇, ARNE와 ARNEA{kind=link} 중국 베이징 공업연구소의 BHR-1
중국 베이징 공업연구소의 BHR-1{kind=link} 불가리아의 로봇 Kibertron. 걷는장면은 아직 못봤음
불가리아의 로봇 Kibertron. 걷는장면은 아직 못봤음{kind=link} 영국 The Shadow project의 로봇. 에어근육 사용
영국 The Shadow project의 로봇. 에어근육 사용{kind=link} 싱가폴의 ARICC (Advanced Robotics and Intelligent Control Centre)의 50cm짜리 로봇 Robo-Erectus III. 이정도는 장난감이지만.
싱가폴의 ARICC (Advanced Robotics and Intelligent Control Centre)의 50cm짜리 로봇 Robo-Erectus III. 이정도는 장난감이지만.{kind=link} 이탈리아 토리노대학의(The Politecnico di Torino)의 ISSAC
이탈리아 토리노대학의(The Politecnico di Torino)의 ISSAC{kind=link} 스웨덴의 Chalmers University 의 귀여운 로봇, Elvis project
스웨덴의 Chalmers University 의 귀여운 로봇, Elvis project {kind=link} 벨기에 The University of Brussels의 150cm, LUCY
벨기에 The University of Brussels의 150cm, LUCY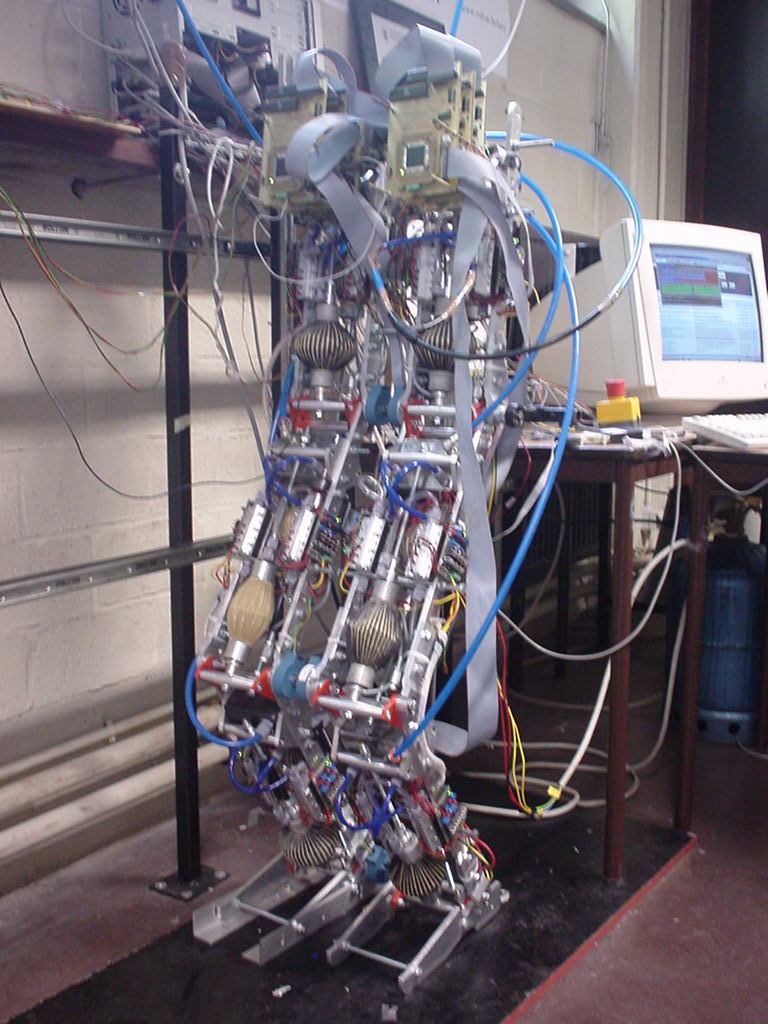{kind=link} 프랑스의 BIPOP 프로젝트의 결과, BIP
프랑스의 BIPOP 프로젝트의 결과, BIP{kind=link} 독일 University of Hannover in Germanydml BART
독일 University of Hannover in Germanydml BART{kind=link} 네덜란드의 Delft University of Technology 의 BAPS
네덜란드의 Delft University of Technology 의 BAPS{kind=link} 오스트리아 Alexander Voglerrk의 로봇
오스트리아 Alexander Voglerrk의 로봇{kind=link} 덴마크 University of South Denmark 의 56cm로봇--류기정
덴마크 University of South Denmark 의 56cm로봇--류기정{kind=link}
우리나라의 2족보행로봇 ¶
- 다진 시스템의 루시라는 40cm짜리 로봇이 2001년인가, 개발되었으나, 이는 장난감 수준이므로 제외하고.
{kind=link} 해양대학교 로봇연구실에서 최초로 2족보행로봇 KUBIR1(Korea-Maritime University Biped Robot 1)를 개발하였다.해양대 지능로보 및 자동화 시스템 연구실의 최형식 교수가 제작한 2족보행로봇
해양대학교 로봇연구실에서 최초로 2족보행로봇 KUBIR1(Korea-Maritime University Biped Robot 1)를 개발하였다.해양대 지능로보 및 자동화 시스템 연구실의 최형식 교수가 제작한 2족보행로봇{kind=link} 관련기사 --류기정
관련기사 --류기정